Amazonで良く安売りされているのだが、肝心なブラケットの入手が難しい
売っていてもサーボ本体より高いのでなかなか手が出ない
以下はタミヤのユニバーサルアームセットを使ってブラケットを作るメモ
 |
| 完成図:こういう片もちタイプのブラケット |
・サーボモーターSG90(とその付属品)
250~400円程度/1個あたり
(価格にすごくムラがある)
本体に付属する十字型のサーボホーンと一番長いネジを使用する
・ユニバーサルアームセット (70143/70183)
グレーとオレンジの2色がある
400円程度
これ1パックでブラケット4つ分
・3mmプッシュリベット (70155)
320円程度
これ1パックでブラケット4つ分
※タミヤの工作シリーズはAmazon在庫が無くマケプレ価格の場合が多い
その場合は店舗やヨドバシなどで適価で買うこと
 |
| 実際はアームとリベット1パックに対してサーボ4つ |
必要な工具:
・プラスチック用ニッパー
なるべく薄型のものを使うとよい
ユニバーサルアームに厚みがあるので厚刃のニッパーを使うと断面が汚くなる
・3mm径ピンバイス (ドリル)(プラスチック用)
軟質素材に対して3mm穴を開けるのに使う
対象が破損しやすいので電動ドリルは避ける
写真はミニ四駆用の3mm径ドリルなのだが生産終了らしい
・油性ペン
ユニバーサルアームを加工する際に目印をつけるのに使う
・カッター/金ヤスリ
ニッパーだけでもできるがあった方が良い
ヤスリは表面仕上げではなく切削に使うので粗めの棒ヤスリがよい
・サーボを動作させられる環境
ArduinoUnoなど
サーボを任意角度に回転させられること
サーボホーンをネジ打ちする際に90°のポジションをとる必要があるため
ネジ打ちを後回しにするならば不要
・ドライバー
サーボのネジの径に合うもの
ネジ打ちを後回しにするならば不要
 |
| 工具リスト/大事なのはニッパーとドリル |
作成方法:
1.ユニバーサルアームの切断
下図を参照してアームを切断すること
・コの字パーツ(10マス長) × 2
・棒パーツ(4マス長) ×2
・L字パーツ × 1
黒い部分は切断/切除する箇所
これでブラケットひとつ分になる
コの字の部分は微調整が必要なのでこの時点で大きく切り過ぎないこと
 |
| ケガキ線を入れた状態/斜線の部分は使わない |
 |
| 切り出した状態 |
2.コの字パーツの微調整
対になっているコの字パーツがサーボモータにはまる用に切削していく
このパーツ同士のはさみこみのみでモータを保持するため切削しすぎないこと
コの字パーツをサーボにはめた状態でパーツ間に1mm程度の隙間ができるのがベスト
微調整のために3.の工程と反復すること
 |
| 加工のイメージ/2つとも同じ様に加工 |
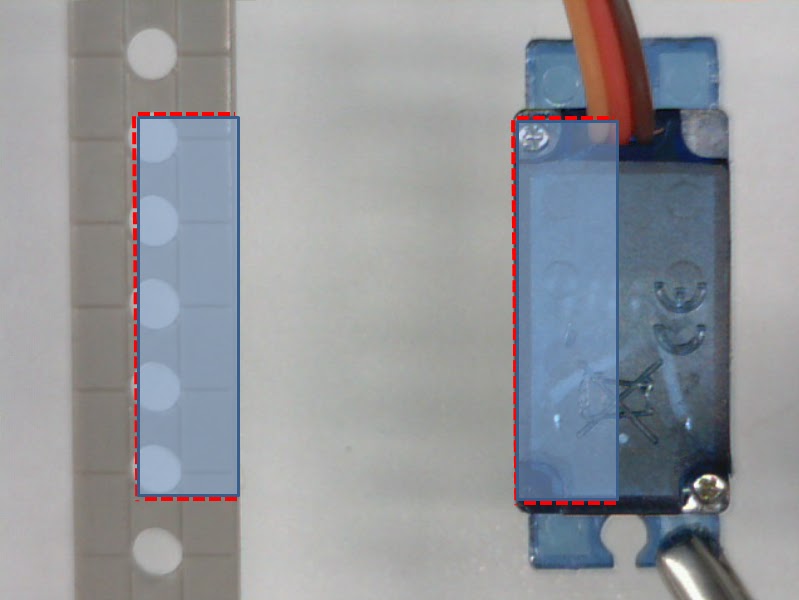 |
| サーボのここにハメるために削る/削りすぎないこと |
3.パーツの組み上げ
アームとプッシュリベットを4つ使って下図のように組み上げる
ユニバーサルアームは弾性(粘り)のある素材で出来ているので
加工精度がかなり悪くても許容される
コの字の部分がサーボに対して小さすぎる場合は2.の工程に戻ること
組みあがった状態でサーボが固定されない場合はパーツの削りすぎ
サーボの周りにテープなどを巻いて太らせること
 |
| サーボ本体がアームから抜けないこと |
 |
| 裏側 |
4.サーボホーンに部品の組み付け
短剣形のサーボホーンの下図の箇所に3mm穴を開ける
破損しやすいので慎重に行うこと/サーボホーンの向きを間違えないこと
(※サーボホーンは上下非対称、太いほうに穴を開ける)
ユニバーサルアームのL字パーツにサーボホーンをリベットで固定する
強度が不足する場合はL字パーツとホーンを接着すること
(どちらも平面が出ているので両面テープでもよい)
 |
| ペンで印をつけた穴を広げる |
 |
| 開口結果/ホーンを破損しないように慎重に |
 |
| リベットで組み付け/はみ出たホーンは邪魔ならば切断すること |
5.サーボホーンのネジ打ち
サーボを動かす環境が無い場合はこの工程は省略(後回しに)すること
サーボを90°の位置に動かす
サーボホーンをサーボに取り付け、付属のネジでネジ打ちすること
スクリューネジでプラスチックのサーボ軸にねじ込むため、やり直しは利かない
 |
| ここから最後までネジこむ |
使用方法:
サーボ本体およびサーボホーン両方に3mm穴のあるユニットが作成できた
あとはこのユニットの組み合わせでさまざまな工作が可能
作例:サーボ8つ使用の4脚メカ
(マイコンと電池は外されている状態/まだスケッチ書いてない…)
 |
| 作例:4脚ロボ/マイコンもバッテリーも載っていない状態なのでスリム |
 |
| 作例:裏面/固定にはリベットと両面テープを使用 |
注意点と発展:
・ブラケットの個体差が大きいのでそれが許される用途に用いること
・サーボをアームで挟み込む構造さえあればよいので、各パーツの寸法を守る必要は無い
例:
・ユニバーサルプレートの端をコの字に切り取ってサーボを取り付ける
・コの字パーツを長めに切り取り脚にする
・L字パーツの代わりに切り取ったアームを取り付ける
・各パーツを長めに切り出して接続用の穴を作る
・コの字パーツの接合を針金やワイヤーで行う
→リベットと4マス棒パーツが不要になる
・アームが片もちなので大きな力をかけると軸が曲がるかも
0 件のコメント:
コメントを投稿