ざっくり概要:
・9台のM5Atomを片方向シリアル接続しており、環状に通信可能上流から来た情報を下流に再送するイメージ
この環状通信でボタンの押し下げとLED点灯命令をやりとりする
・9台のうち1台が親機で残りは子機
〇×ゲームを処理するのは親機
子機へのLED点灯命令発行、子機からのボタン押し下げイベント受理を行う
子機は自分のボタン監視(イベント発行)とLED制御のみ
 |
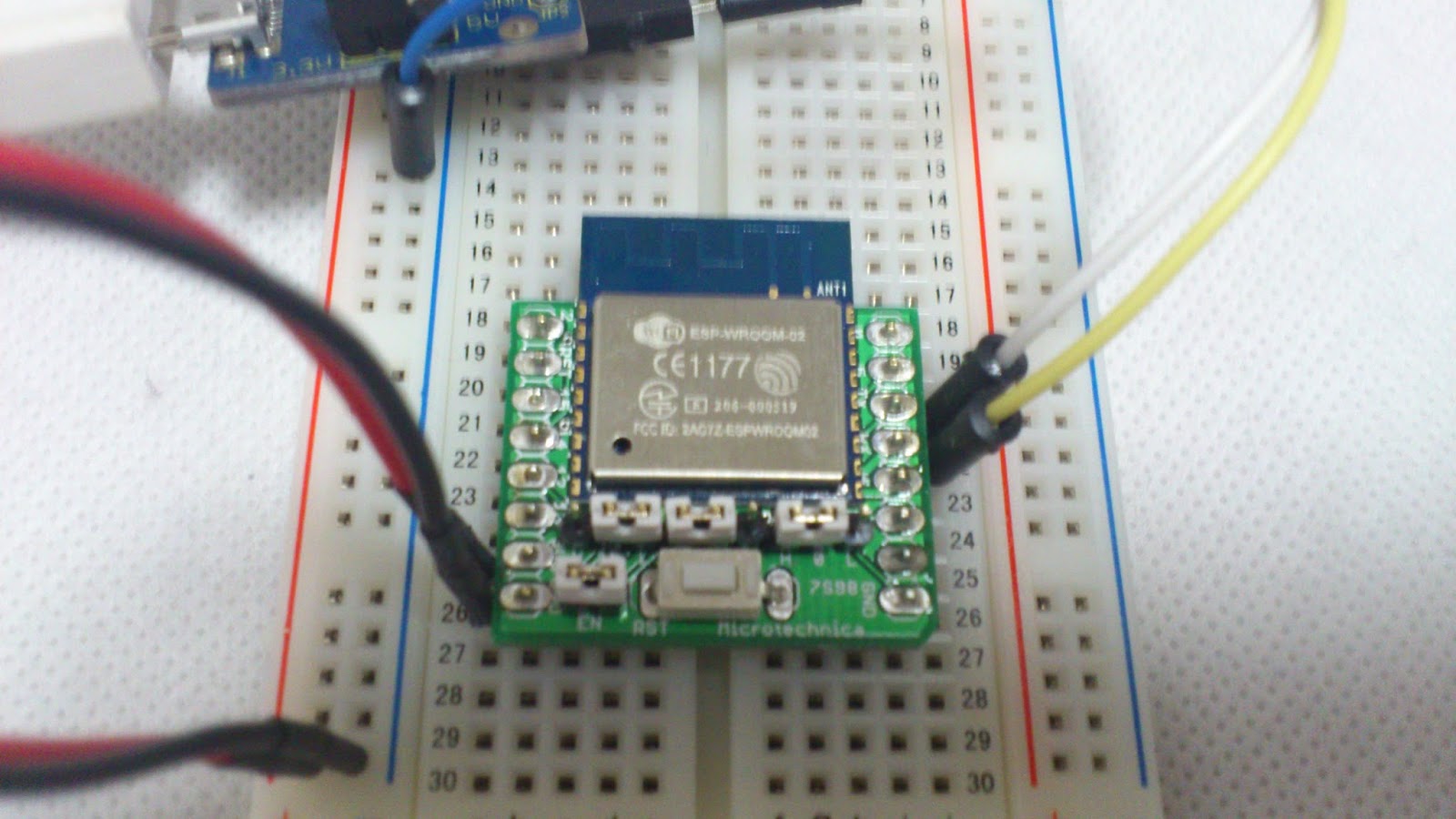
| 配線の様子:ジャンパ線の長さがまちまちなのは手製のため |
テクニカルな話:
・M5Atomは背面5Vへの電源供給で動作実動作上は5V≒VCC端子
回路図が公開されていないのでやや不安
給電には5V2AのACアダプタ使用
3/13追記:
背面からの給電でアクセスポイントとして動作させた際の発熱が凄い
USB給電の場合と比べてはっきりと発熱に差がある
仕様がはっきりするまで給電に使うべきではないかも…
・1台にUSB給電するとほかの8台もドライブしてしまう
定格電流やUSB給電の仕様が公開されてないので怖くて使っていない
一台当たり50mA強はいけそうな気もするが…?
今後の課題とする
・〇×ゲームにはミニマックス法を使ったため、プレーヤーは一生勝てない
クソゲーである
(※〇×ゲームは互いに最善手を打つ限り常に引き分けるゲーム)
意図的に手加減する処理を入れないと病む
 |
| M5Atomは電源周りの情報がないのが不安 |